卡尔曼滤波
什么是卡尔曼滤波?
卡尔曼滤波器就是根据上一时刻的状态,预测当前时刻的状态,将预测的状态与当前时刻的测量值进行加权,加权后的结果才认为是当前的实际状态,而不是仅仅听信当前的测量值。
对于这个滤波器,我们几乎可以下这么一个定论:只要是存在不确定信息的动态系统,卡尔曼滤波就可以对系统下一步要做什么做出有根据的推测。即便有噪声信息干扰,卡尔曼滤波通常也能很好的弄清楚究竟发生了什么,找出现象间不易察觉的相关性。
因此卡尔曼滤波非常适合不断变化的系统,它的优点还有内存占用较小(只需保留前一个状态)、速度快,是实时问题和嵌入式系统的理想选择。
能用卡尔曼滤波做什么?
让我们举个例子:你造了一个可以在树林里四处溜达的小机器人,为了让它实现导航,机器人需要知道自己所处的位置。机器人有一个包含位置信息和速度信息的状态\(\mathop{x_k}\limits ^{\rightarrow}\)。
\[\mathop{x_k}\limits ^{\rightarrow} = (\mathop{p}\limits ^{\rightarrow}, \mathop{v}\limits ^{\rightarrow})\]注意,在这个例子中,状态是位置和速度,放进其他问题里,它也可以是水箱里的液体体积、汽车引擎温度、触摸板上指尖的位置,或者其他任何数据。
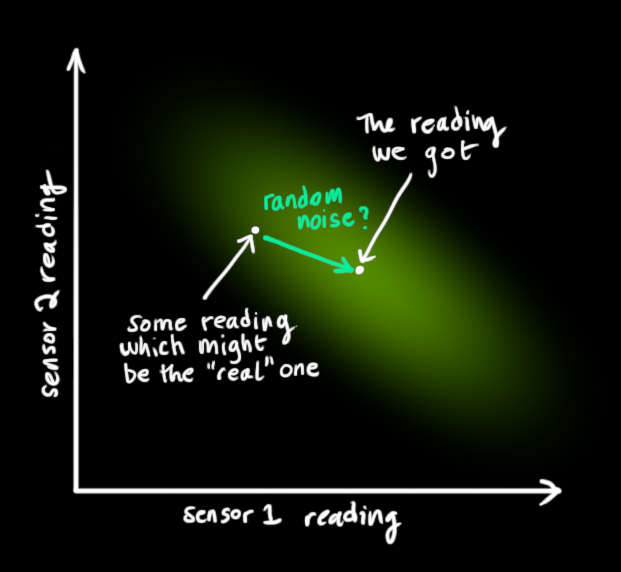
我们的小机器人装有GPS传感器,定位精度10米。虽然一般来说这点精度够用了,但我们希望它的定位误差能再小点,毕竟树林里到处都是土坑和陡坡,如果机器人稍稍偏了那么几米,它就有可能滚落山坡。所以GPS提供的信息还不够充分。
我们也可以预测机器人是怎么移动的:它会把指令发送给控制轮子的马达,如果这一刻它始终朝一个方向前进,没有遇到任何障碍物,那么下一刻它可能会继续坚持这个路线。但是机器人对自己的状态不是全知的:它可能会逆风行驶,轮子打滑,滚落颠簸地形……所以车轮转动次数并不能完全代表实际行驶距离,基于这个距离的预测也不完美。
这个问题下,GPS为我们提供了一些关于状态的信息,但那是间接的、不准确的;我们的预测提供了关于机器人轨迹的信息,但那也是间接的、不准确的。
但以上就是我们能够获得的全部信息,在它们的基础上,我们是否能给出一个完整预测,让它的准确度比机器人搜集的单次预测汇总更高?用了卡尔曼滤波,这个问题可以迎刃而解。
卡尔曼滤波眼里的机器人问题
还是上面这个问题,我们有一个状态,它和速度、位置有关:
\[\mathop{x_k}\limits ^{\rightarrow} = \begin{bmatrix} p \\ v \end{bmatrix}\]我们不知道它们的实际值是多少,但掌握着一些速度和位置的可能组合,其中某些组合的可能性更高:
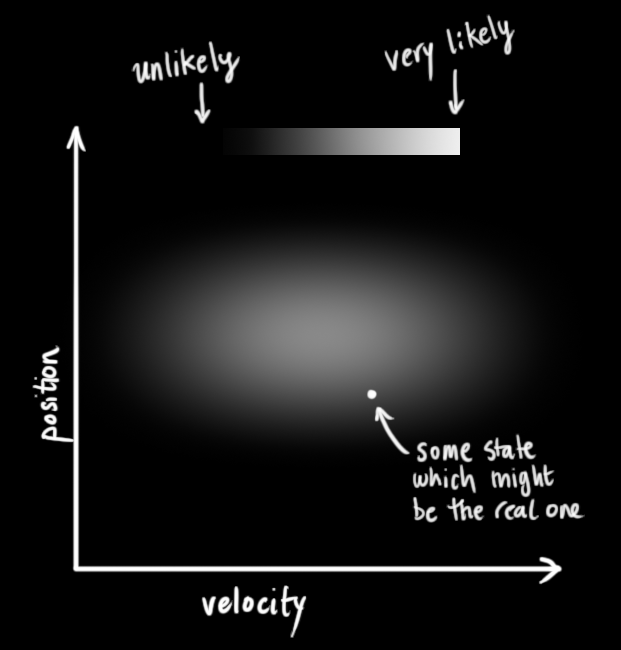
卡尔曼滤波假设两个变量(在我们的例子里是位置和速度)都应该是随机的,而且符合高斯分布。每个变量都有一个均值 \(\mu\) ,它是随机分布的中心;有一个方差 \(\sigma^2\) ,它衡量组合的不确定性。
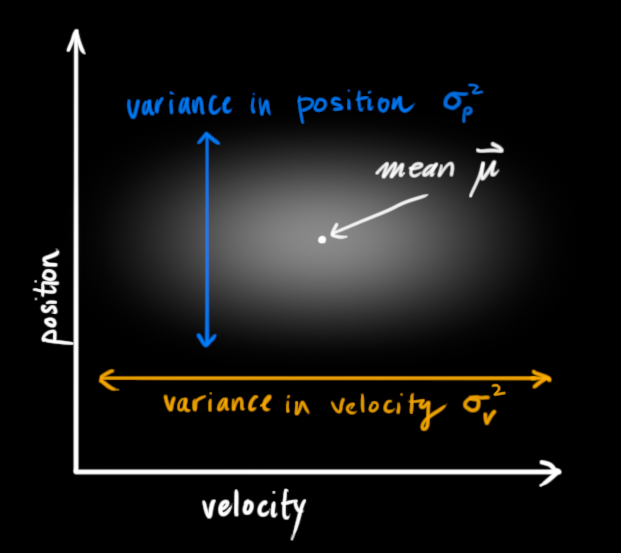
在上图中,位置和速度是不相关的,这意味着我们不能从一个变量推测另一个变量。
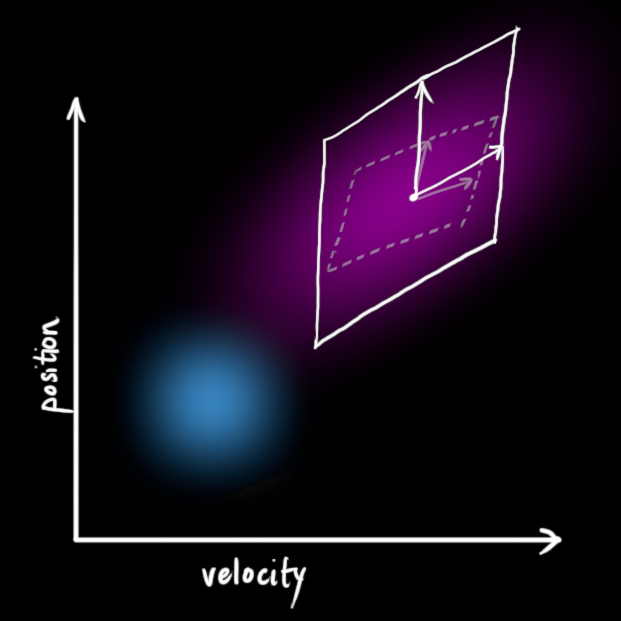
那么如果位置和速度相关呢?如下图所示,机器人前往特定位置的可能性取决于它拥有的速度。
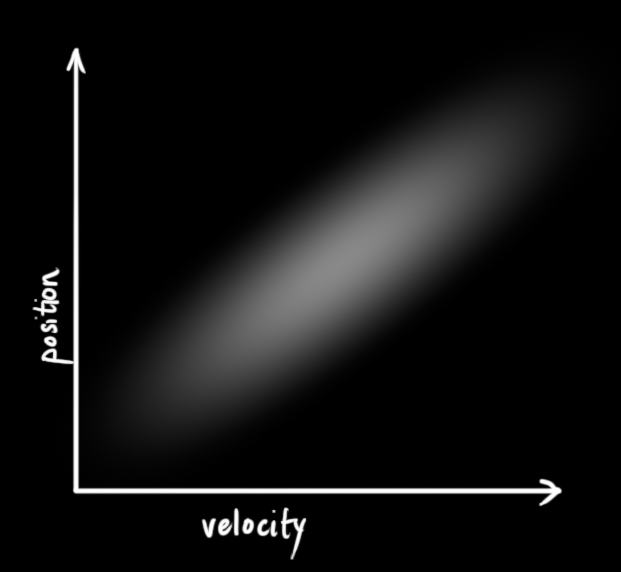
这不难理解,如果基于旧位置估计新位置,我们会产生这两个结论:如果速度很快,机器人可能移动得更远,所以得到的位置会更远;如果速度很慢,机器人就走不了那么远。
这种关系对目标跟踪来说非常重要,因为它提供了更多信息:一个可以衡量可能性的标准。这就是卡尔曼滤波的目标:从不确定信息中挤出尽可能多的信息!
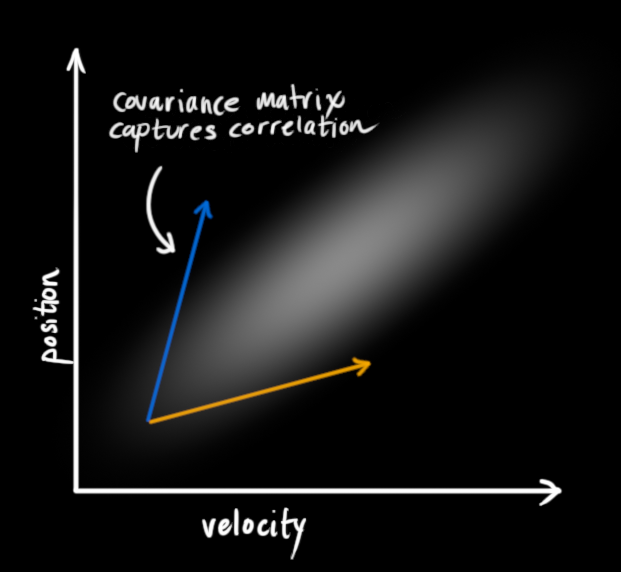
为了捕获这种相关性,我们用的是协方差矩阵。简而言之,矩阵的每个值是第 \(i\) 个变量和第 \(j\) 个变量之间的相关程度(由于矩阵是对称的, \(i\) 和 \(j\) 的位置可以随便交换)。我们用 \(\Sigma\) 表示协方差矩阵,在这个例子中,就是\(\Sigma_{ij}\)。
用矩阵描述问题
为了把以上关于状态的信息建模为高斯分布(图中色块),我们还需要 \(k\) 时的两个信息:最佳估计 \(\hat{x_k}\) (均值,也就是\(u\) ,协方差矩阵 \(P_K\) 。(虽然还是用了位置和速度两个变量,但只要和问题相关,卡尔曼滤波可以包含任意数量的变量)
\[\hat{x_k} = \begin{bmatrix} position \\ velocity \end{bmatrix}\] \[P_k = \begin{bmatrix} position \\ velocity \end{bmatrix}\]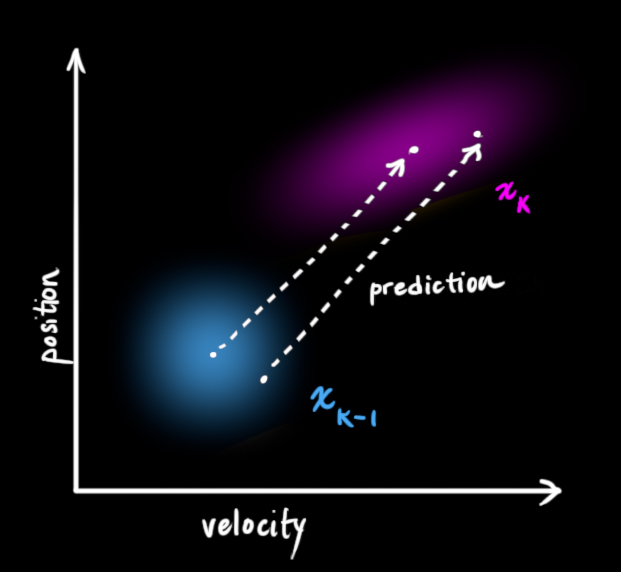
我们可以用矩阵\(F_k\)表示这个预测步骤:
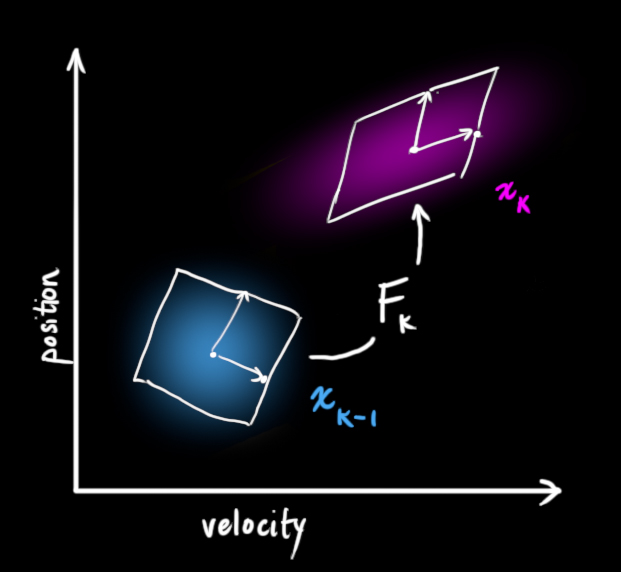
它获取我们原始估计中的每个点并将其移动到新的预测位置,如果原始估计是正确的,系统将移动到该位置。
这是怎么做到的?为什么我们可以用矩阵来预测机器人下一刻的位置和速度?下面是个简单公式:
\[\begin{split} \color{deeppink}{p_k} &= \color{royalblue}{p_{k-1}} + \Delta t &\color{royalblue}{v_{k-1}} \\ \color{deeppink}{v_k} &= &\color{royalblue}{v_{k-1}} \end{split}\] \[\begin{align} \color{deeppink}{\mathbf{\hat{x}}_k} &= \begin{bmatrix} 1 & \Delta t \\ 0 & 1 \end{bmatrix} \color{royalblue}{\mathbf{\hat{x}}_{k-1}} \\ &= \mathbf{F}_k \color{royalblue}{\mathbf{\hat{x}}_{k-1}} \label{statevars} \end{align}\]这是一个预测矩阵,它能给出机器人的下一个状态,但目前我们还不知道协方差矩阵的更新方法。这也是我们要引出下面这个等式的原因:如果我们将分布中的每个点乘以矩阵A,那么它的协方差矩阵会发生什么变化
\[\begin{equation} \begin{split} Cov(x) &= \Sigma\\ Cov(\color{firebrick}{\mathbf{A}}x) &= \color{firebrick}{\mathbf{A}} \Sigma \color{firebrick}{\mathbf{A}}^T \end{split} \label{covident} \end{equation}\]把这个式子和上面的最佳估计\(\hat{x}_k\)结合,可得:
\[\begin{equation} \begin{split} \color{deeppink}{\mathbf{\hat{x}}_k} &= \mathbf{F}_k \color{royalblue}{\mathbf{\hat{x}}_{k-1}} \\ \color{deeppink}{\mathbf{P}_k} &= \mathbf{F_k} \color{royalblue}{\mathbf{P}_{k-1}} \mathbf{F}_k^T \end{split} \end{equation}\]外部影响
但是,除了速度和位置,外因也会对系统造成影响。比如模拟火车运动,除了列车自驾系统,列车操作员可能会手动调速。在我们的机器人示例中,导航软件也可以发出停止指令。对于这些信息,我们把它作为一个向量 \(\color{darkorange}{\vec{\mathbf{u}_k}}\) ,纳入预测系统作为修正。
假设油门设置和控制命令是已知的,我们知道火车的预期加速度 \(a\) 。根据运动学基本定理,我们可得:
\[\begin{split} \color{deeppink}{p_k} &= \color{royalblue}{p_{k-1}} + {\Delta t} &\color{royalblue}{v_{k-1}} + &\frac{1}{2} \color{darkorange}{a} {\Delta t}^2 \\ \color{deeppink}{v_k} &= &\color{royalblue}{v_{k-1}} + & \color{darkorange}{a} {\Delta t} \end{split}\]矩阵形式为:
\[\begin{equation} \begin{split} \color{deeppink}{\mathbf{\hat{x}}_k} &= \mathbf{F}_k \color{royalblue}{\mathbf{\hat{x}}_{k-1}} + \begin{bmatrix} \frac{\Delta t^2}{2} \\ \Delta t \end{bmatrix} \color{darkorange}{a} \\ &= \mathbf{F}_k \color{royalblue}{\mathbf{\hat{x}}_{k-1}} + \mathbf{B}_k \color{darkorange}{\vec{\mathbf{u}_k}} \end{split} \end{equation}\]\(B_k\)是控制矩阵, \(\color{darkorange}{\vec{\mathbf{u}_k}}\)是控制向量。如果外部环境异常简单,我们可以忽略这部分内容,但是如果添加了外部影响后,模型的准确率还是上不去,这又是为什么呢?
外部不确定性
如果状态基于其自身属性而演变,那么一切都很好。如果状态在外力的基础上发展,一切都很好,那么我们知道那些外力是什么。
但是,如果存在我们不知道的力量呢?当我们监控无人机时,它可能会受到风的影响;当我们跟踪轮式机器人时,它的轮胎可能会打滑,或者粗糙地面会降低它的移速。这些因素是难以掌握的,如果出现其中的任意一种情况,预测结果就难以保障。
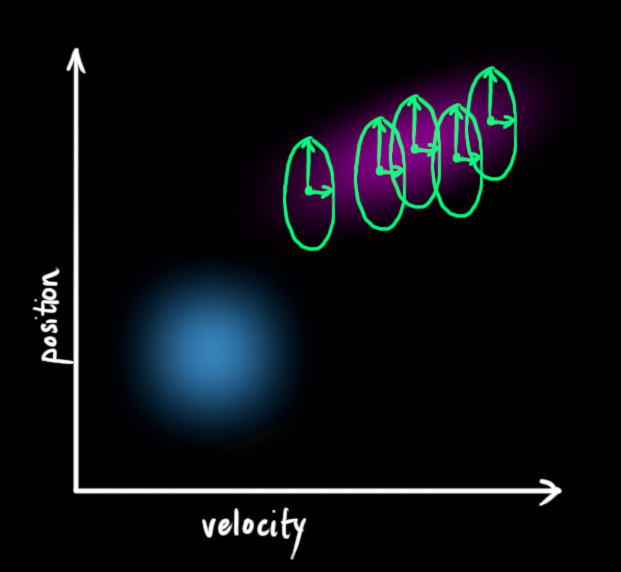
这要求我们在每个预测步骤后再加上一些新的不确定性,来模拟和"世界"相关的所有不确定性:
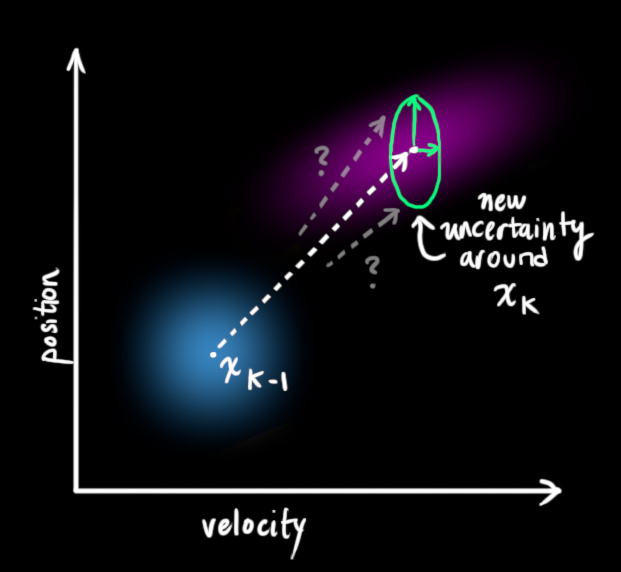
如上图所示,加上外部不确定性后,\(\color{royalblue}{\mathbf{\hat{x}}_{k-1}}\)的每个预测状态都可能会移动到另一点,也就是蓝色的高斯分布会移动到紫色高斯分布的位置,并且具有协方差\(\color{mediumaquamarine}{\mathbf{Q}_k}\)。换句话说,我们把这些不确定影响视为协方差\(\color{mediumaquamarine}{\mathbf{Q}_k}\)的噪声。
这个紫色的高斯分布拥有和原分布相同的均值,但协方差不同。
我们在原式上加入\(\color{mediumaquamarine}{\mathbf{Q}_k}\): \(\begin{equation} \begin{split} \color{deeppink}{\mathbf{\hat{x}}_k} &= \mathbf{F}_k \color{royalblue}{\mathbf{\hat{x}}_{k-1}} + \mathbf{B}_k \color{darkorange}{\vec{\mathbf{u}_k}} \\ \color{deeppink}{\mathbf{P}_k} &= \mathbf{F_k} \color{royalblue}{\mathbf{P}_{k-1}} \mathbf{F}_k^T + \color{mediumaquamarine}{\mathbf{Q}_k} \end{split} \label{kalpredictfull} \end{equation}\)
简而言之,这里:
新的最佳估计 是基于 原最佳估计 和 已知外部影响 校正后得到的预测。
新的不确定性 是基于 原不确定性和外部环境的不确定性 得到的预测。
现在,有了这些概念介绍,我们可以把传感器数据输入其中。
通过测量来细化估计值
我们可能有好几个传感器,它们一起提供有关系统状态的信息。传感器的作用不是我们关心的重点,它可以读取位置,可以读取速度,重点是,它能告诉我们关于状态的间接信息——它是状态下产生的一组读数。
请注意,读数的规模和状态的规模不一定相同,所以我们把传感器读数矩阵设为\(H_k\) 。
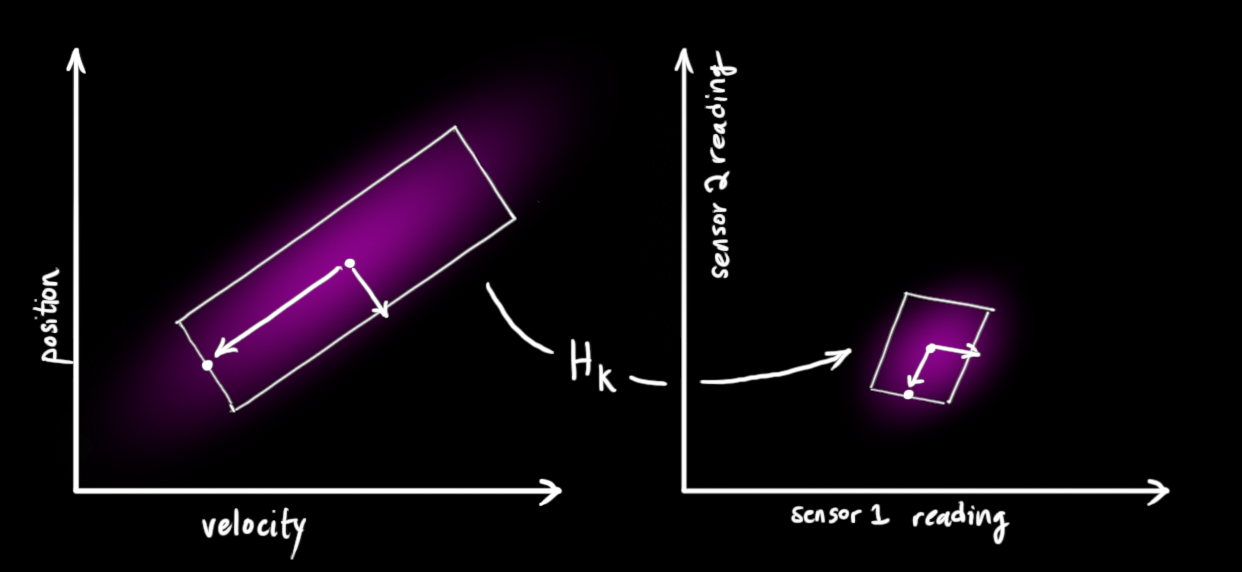
把这些分布转换为一般形式: \(\begin{equation} \begin{aligned} \vec{\mu}_{\text{expected}} &= \mathbf{H}_k \color{deeppink}{\mathbf{\hat{x}}_k} \\ \mathbf{\Sigma}_{\text{expected}} &= \mathbf{H}_k \color{deeppink}{\mathbf{P}_k} \mathbf{H}_k^T \end{aligned} \end{equation}\)
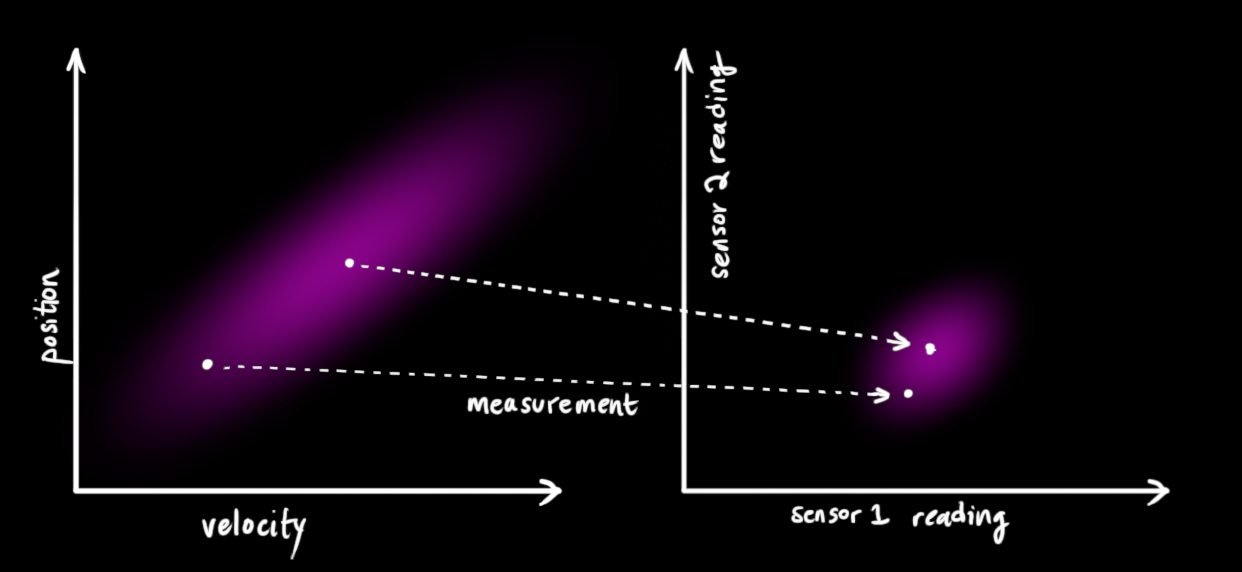
卡尔曼滤波的一大优点是擅长处理传感器噪声。换句话说,由于种种因素,传感器记录的信息其实是不准的,一个状态事实上可以产生多种读数。
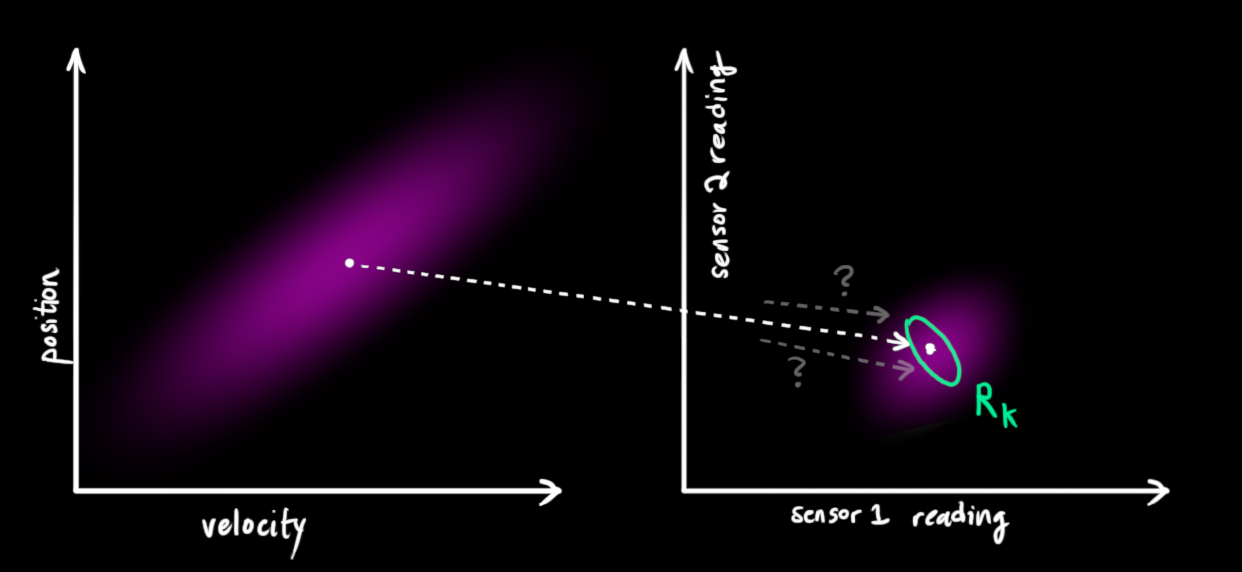
从我们观察到的每个读数中,我们可能会猜测我们的系统处于特定状态。但由于存在不确定性,一些状态比其他状态更有可能产生我们看到的读数:
我们将这种不确定性(即传感器噪声)的协方差设为\(R_k\),读数的分布均值设为\(z_k\)。
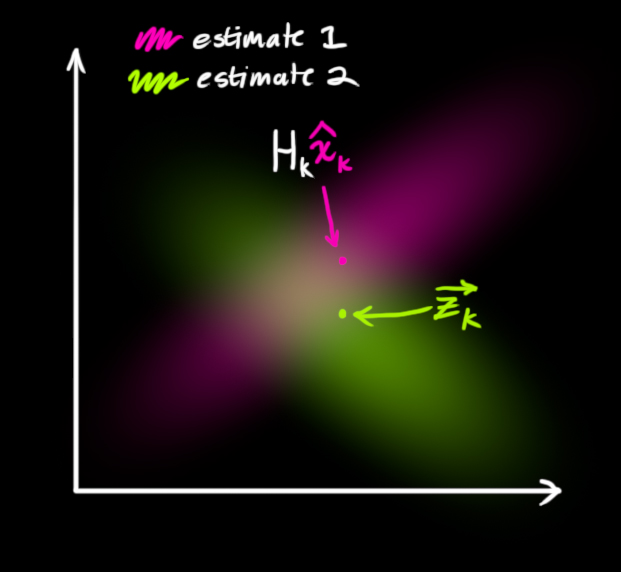
现在我们得到了两块高斯分布,一块围绕预测的均值,另一块围绕传感器读数。
如果要生成靠谱预测,模型必须调和这两个信息。也就是说,对于任何可能的读数(z1,z2),这两种方法预测的状态都有可能是准的,也都有可能是不准的。重点是我们怎么找到这两个准确率。
最简单的方法是两者相乘:
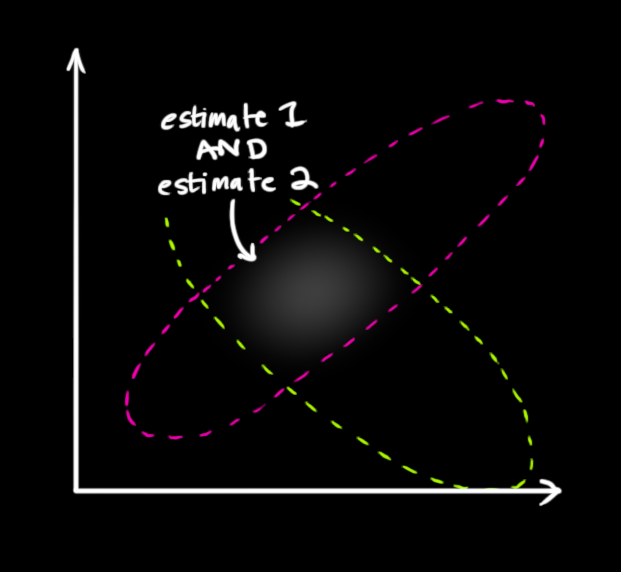
两块高斯分布相乘后,我们可以得到它们的重叠部分,这也是会出现最佳估计的区域。换个角度看,它看起来也符合高斯分布:
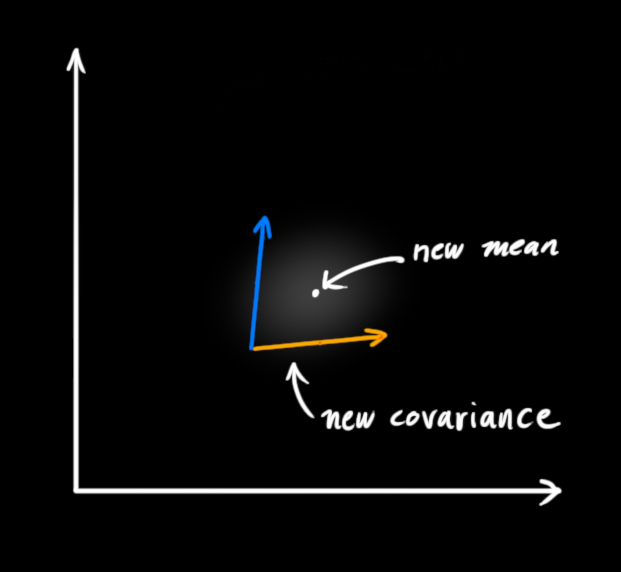
事实证明,当你把两个高斯分布和它们各自的均值和协方差矩阵相乘时,你会得到一个拥有独立均值和协方差矩阵的新高斯分布。最后剩下的问题就不难解决了:我们必须有一个公式来从旧的参数中获取这些新参数!
结合高斯
让我们从一维看起,设方差为\(\sigma^2\),均值为 \(\mu\),它是随机分布的中心;有一个方差一个标准一维高斯钟形曲线方程如下所示: \(\begin{equation} \label{gaussformula} \mathcal{N}(x, \mu,\sigma) = \frac{1}{ \sigma \sqrt{ 2\pi } } e^{ -\frac{ (x – \mu)^2 }{ 2\sigma^2 } } \end{equation}\)
那么两条高斯曲线相乘呢?
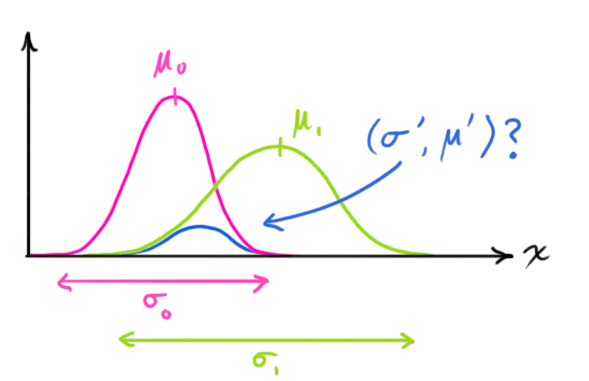
把这个式子按照一维方程进行扩展,可得:
\[\begin{equation} \label{fusionformula} \begin{aligned} \color{royalblue}{\mu'} &= \mu_0 + \frac{\sigma_0^2 (\mu_1 – \mu_0)} {\sigma_0^2 + \sigma_1^2}\\ \color{mediumblue}{\sigma'}^2 &= \sigma_0^2 – \frac{\sigma_0^4} {\sigma_0^2 + \sigma_1^2} \end{aligned} \end{equation}\]如果有些太复杂,我们用k简化一下:
\[\begin{equation} \label{gainformula} \color{purple}{\mathbf{k}} = \frac{\sigma_0^2}{\sigma_0^2 + \sigma_1^2} \end{equation}\] \[\begin{equation} \begin{split} \color{royalblue}{\mu'} &= \mu_0 + &\color{purple}{\mathbf{k}} (\mu_1 – \mu_0)\\ \color{mediumblue}{\sigma'}^2 &= \sigma_0^2 – &\color{purple}{\mathbf{k}} \sigma_0^2 \end{split} \label{update} \end{equation}\]矩阵版本:
\[\begin{equation} \label{matrixgain} \color{purple}{\mathbf{K}} = \Sigma_0 (\Sigma_0 + \Sigma_1)^{-1} \end{equation}\] \[\begin{equation} \begin{split} \color{royalblue}{\vec{\mu}'} &= \vec{\mu_0} + &\color{purple}{\mathbf{K}} (\vec{\mu_1} – \vec{\mu_0})\\ \color{mediumblue}{\Sigma'} &= \Sigma_0 – &\color{purple}{\mathbf{K}} \Sigma_0 \end{split} \label{matrixupdate} \end{equation}\]矩阵 \(K\) 就是我们说的卡尔曼增益
结合
截至目前,我们有用矩阵\((\color{fuchsia}{\mu_0}, \color{deeppink}{\Sigma_0}) = (\color{fuchsia}{\mathbf{H}_k \mathbf{\hat{x}}_k}, \color{deeppink}{\mathbf{H}_k \mathbf{P}_k \mathbf{H}_k^T})\)
预测的分布,有用传感器读数\((\color{yellowgreen}{\mu_1}, \color{mediumaquamarine}{\Sigma_1}) = (\color{yellowgreen}{\vec{\mathbf{z}_k}}, \color{mediumaquamarine}{\mathbf{R}_k})\)预测的分布。把它们代入上节的矩阵等式中:
\[\begin{equation} \begin{aligned} \mathbf{H}_k \color{royalblue}{\mathbf{\hat{x}}_k'} &= \color{fuchsia}{\mathbf{H}_k \mathbf{\hat{x}}_k} & + & \color{purple}{\mathbf{K}} ( \color{yellowgreen}{\vec{\mathbf{z}_k}} – \color{fuchsia}{\mathbf{H}_k \mathbf{\hat{x}}_k} ) \\ \mathbf{H}_k \color{royalblue}{\mathbf{P}_k'} \mathbf{H}_k^T &= \color{deeppink}{\mathbf{H}_k \mathbf{P}_k \mathbf{H}_k^T} & – & \color{purple}{\mathbf{K}} \color{deeppink}{\mathbf{H}_k \mathbf{P}_k \mathbf{H}_k^T} \end{aligned} \label {kalunsimplified} \end{equation}\]卡尔曼增益就是:
\[\begin{equation} \label{eq:kalgainunsimplified} \color{purple}{\mathbf{K}} = \color{deeppink}{\mathbf{H}_k \mathbf{P}_k \mathbf{H}_k^T} ( \color{deeppink}{\mathbf{H}_k \mathbf{P}_k \mathbf{H}_k^T} + \color{mediumaquamarine}{\mathbf{R}_k})^{-1} \end{equation}\]化简后得:
\[\begin{equation} \begin{split} \color{royalblue}{\mathbf{\hat{x}}_k'} &= \color{fuchsia}{\mathbf{\hat{x}}_k} & + & \color{purple}{\mathbf{K}'} ( \color{yellowgreen}{\vec{\mathbf{z}_k}} – \color{fuchsia}{\mathbf{H}_k \mathbf{\hat{x}}_k} ) \\ \color{royalblue}{\mathbf{P}_k'} &= \color{deeppink}{\mathbf{P}_k} & – & \color{purple}{\mathbf{K}'} \color{deeppink}{\mathbf{H}_k \mathbf{P}_k} \end{split} \label{kalupdatefull} \end{equation}\] \[\begin{equation} \color{purple}{\mathbf{K}'} = \color{deeppink}{\mathbf{P}_k \mathbf{H}_k^T} ( \color{deeppink}{\mathbf{H}_k \mathbf{P}_k \mathbf{H}_k^T} + \color{mediumaquamarine}{\mathbf{R}_k})^{-1} \label{kalgainfull} \end{equation}\]最后, \(\color{royalblue}{\mathbf{\hat{x}}_k'}\)是我们的最佳估计值,我们可以把它继续放进去做另一轮预测:
卡尔曼滤波将允许您准确地建模任何线性系统。对于非线性系统,我们使用扩展卡尔曼滤波器,它通过简单地线性化关于它们的平均值的预测和测量来工作。
总结
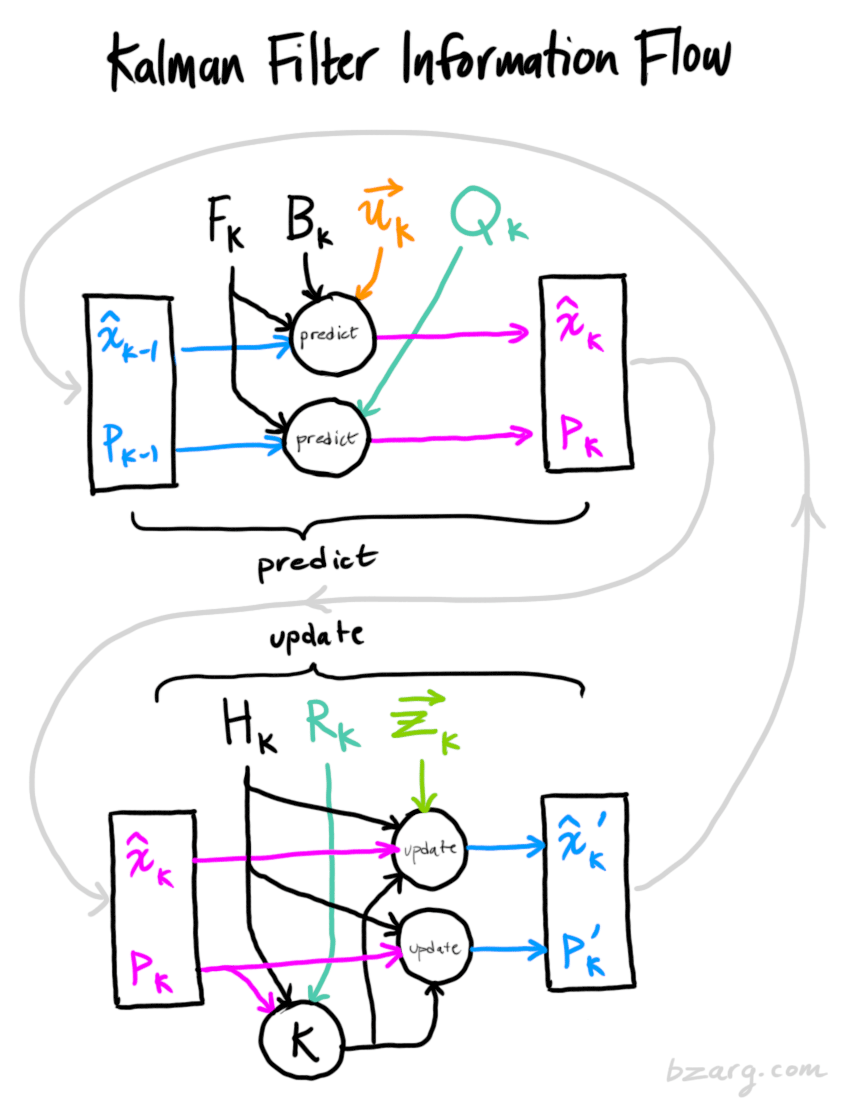
将上面的理论进行总结,可以得到下面几个公式,即卡尔曼滤波器的理性描述,使用下面的公式,就能够实现一个完整的卡尔曼滤波器
预测:
预测状态:\(\begin{equation} \begin{split} \color{deeppink}{\mathbf{\hat{x}}_k} &= \mathbf{F}_k \color{royalblue}{\mathbf{\hat{x}}_{k-1}} + \mathbf{B}_k \color{darkorange}{\vec{\mathbf{u}_k}} \\ \color{deeppink}{\mathbf{P}_k} &= \mathbf{F_k} \color{royalblue}{\mathbf{P}_{k-1}} \mathbf{F}_k^T + \color{mediumaquamarine}{\mathbf{Q}_k} \end{split} \end{equation}\)
更新:
卡尔曼增益: \(\begin{equation} \color{purple}{\mathbf{K}'} = \color{deeppink}{\mathbf{P}_k \mathbf{H}_k^T} ( \color{deeppink}{\mathbf{H}_k \mathbf{P}_k \mathbf{H}_k^T} + \color{mediumaquamarine}{\mathbf{R}_k})^{-1} \end{equation}\)
最佳估计:\(\begin{equation} \begin{split} \color{royalblue}{\mathbf{\hat{x}}_k'} &= \color{fuchsia}{\mathbf{\hat{x}}_k} & + & \color{purple}{\mathbf{K}'} ( \color{yellowgreen}{\vec{\mathbf{z}_k}} – \color{fuchsia}{\mathbf{H}_k \mathbf{\hat{x}}_k} ) \\ \color{royalblue}{\mathbf{P}_k'} &= \color{deeppink}{\mathbf{P}_k} & – & \color{purple}{\mathbf{K}'} \color{deeppink}{\mathbf{H}_k \mathbf{P}_k} \end{split} \end{equation}\)
参数解释:
\(\hat{x}_k\):状态向量。
\(F_k\):状态转移矩阵,为常数。
\(B_k\):控制矩阵。受外部环境影响,可为空。
\(\vec{\mathbf{u}_k}\):控制向量。受外部环境影响,可为空。
\(P_k\):协方差矩阵,为常数。
\(Q_k\):预测噪声协方差矩阵,为常数。
\(R_k\):观测噪声协方差矩阵,为常数。
\(\mathbf{K}'\):计算出的卡尔曼增益。
\(H_k\):观测矩阵。为常数。
\(\mathbf{z}_k\):测量值向量。
代码
KF.h
#ifndef KF_H
#define KF_H
#include "../lib/Eigen/Dense"
class KalmanFilter
{
private:
int stateSize; //state variable's dimenssion
int measSize; //measurement variable's dimession
int uSize; //control variables's dimenssion
Eigen::VectorXd x; //状态
Eigen::VectorXd z; //测量值
Eigen::MatrixXd A; //状态转移矩阵
Eigen::MatrixXd B; //输入控制矩阵
Eigen::VectorXd u; //控制向量,外界对系统的作用
Eigen::MatrixXd P; //coveriance
Eigen::MatrixXd H; //观测矩阵
Eigen::MatrixXd R; //measurement noise covariance
Eigen::MatrixXd Q; //process noise covariance
void CalculateJacobianMatrix();
public:
KalmanFilter(int stateSize_=0, int measSize_=0,int uSize_=0);//构造函数
~KalmanFilter(){} //析构函数
void init(Eigen::VectorXd &x_, Eigen::MatrixXd& P_,Eigen::MatrixXd& R_, Eigen::MatrixXd& Q_);
Eigen::VectorXd predict(Eigen::MatrixXd& A_);
Eigen::VectorXd predict(Eigen::MatrixXd& A_, Eigen::MatrixXd &B_, Eigen::VectorXd &u_);
void KFUpdate(Eigen::MatrixXd& H_, Eigen::VectorXd z_meas);
void EKFUpdate(Eigen::MatrixXd& H_, Eigen::VectorXd z_meas);
};
#endif //KF_H
KF.cpp
#include <iostream>
#include "KF.h"
using namespace std;
KalmanFilter::KalmanFilter(int stateSize_, int measSize_, int uSize_) :stateSize(stateSize_), measSize(measSize_), uSize(uSize_)
{
if (stateSize == 0 || measSize == 0)
{
std::cerr << "Error, State size and measurement size must bigger than 0\n";
}
x.resize(stateSize);
x.setZero();
A.resize(stateSize, stateSize);
A.setIdentity();
u.resize(uSize);
u.transpose();
u.setZero();
B.resize(stateSize, uSize);
B.setZero();
P.resize(stateSize, stateSize);
P.setIdentity();
H.resize(measSize, stateSize);
H.setZero();
z.resize(measSize);
z.setZero();
Q.resize(stateSize, stateSize);
Q.setZero();
R.resize(measSize, measSize);
R.setZero();
}
void KalmanFilter::init(Eigen::VectorXd &x_, Eigen::MatrixXd& P_, Eigen::MatrixXd& R_, Eigen::MatrixXd& Q_)
{
x = x_;
P = P_;
R = R_;
Q = Q_;
}
// 已知控制矩阵B和控制向量u
Eigen::VectorXd KalmanFilter::predict(Eigen::MatrixXd& A_, Eigen::MatrixXd &B_, Eigen::VectorXd &u_)
{
A = A_;
B = B_;
u = u_;
x = A * x + B * u;
Eigen::MatrixXd F_T = A.transpose();
P = A * P * F_T + Q;
return x;
}
// 未知控制矩阵B和控制向量u
Eigen::VectorXd KalmanFilter::predict(Eigen::MatrixXd& A_)
{
A = A_;
x = A * x;
Eigen::MatrixXd A_T = A.transpose();
P = A * P * A_T + Q;
// cout << "P-=" << P<< endl;
return x;
}
void KalmanFilter::KFUpdate(Eigen::MatrixXd& H_, Eigen::VectorXd z_meas)
{
H = H_;
Eigen::MatrixXd S,Ht;
Ht = H.transpose();
S = H * P * Ht + R;
Eigen::MatrixXd K = P*Ht*S.inverse(); //卡尔曼增益
z = H * x;
x = x + K * (z_meas - z);
Eigen::MatrixXd I = Eigen::MatrixXd::Identity(stateSize, stateSize);
P = (I - K * H) * P;
// cout << "P=" << P << endl;
}