线性代数:线性代数到底都讲了些什么?
概率统计关注的是随机变量及其概率分布,以及如何通过观测数据来推断这 些分布。可是,在解决很多问题的时候,我们不仅要关心单个变量之间的关系,还要进一步 研究多个变量之间的关系,最典型的例子就是基于多个特征的信息检索和机器学习。
在信息检索中,我们需要考虑多个关键词特征对最终相关性的影响,而在机器学习中,无论 是监督式还是非监督式学习,我们都需要考虑多个特征对模型拟合的影响。在研究多个变量 之间关系的时候,线性代数成为了解决这类问题的有力工具。
另一方面,在我们日常生活和工作中,很多问题都可以线性化,小到计算两个地点之间的距 离,大到计算互联网中全部网页的 PageRank。所以,为了使用编程来解决相应的问题, 我们也必须掌握一些必要的线性代数基础知识。因此,我会从线性代数的基本概念出发,结 合信息检索和机器学习领域的知识,详细讲解线性代数的运用。
向量和向量空间
标量(Scalar)只是一个单独的数字,而且不能表示方向。从计算机数据结构的角度来看,标量就是编程中最基本的变量。这个很好理解,你可以回想一下刚开始学习编程时接触到的标量类型的变量。
和标量对应的概念,就是线性代数中最常用、也最重要的概念,向量(Vector),也可以 叫作矢量。它代表一组数字,并且这些数字是有序排列的。我们用数据结构的视角来看,向 量可以用数组或者链表来表达。
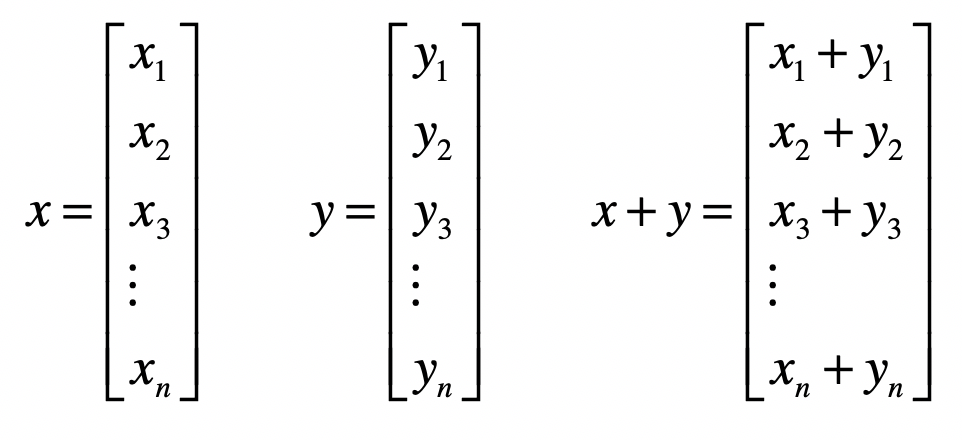
用加粗的小写字母表示一个向量,例如 x ,而 $x_1, x_2, x_3, x_n$ 等等,来表示向量中的每个元素,这里面的 n 就是向量的维。

向量和标量最大的区别在于,向量除了拥有数值的大小,还拥有方向。向量或者矢量中 的"向"和"矢"这两个字,都表明它们是有方向的。你可能会问,为什么这一串数字能表 示方向呢?
这是因为,如果我们把某个向量中的元素看作坐标轴上的坐标,那么这个向量就可以看作空 间中的一个点。以原点为起点,以向量代表的点为终点,就能形成一条有向直线。而这样的 处理其实已经给向量赋予了代数的含义,使得计算的过程中更加直观。
由于一个向量包含了很多个元素,因此我们自然地就可以把它运用在机器学习的领域。
由于物体的特征有很多维,因此我们可以使用向量来表示某个物体的特征。其中,向量的每个元素就代表一维特 征,而元素的值代表了相应特征的值,我们称这类向量为特征向量(Feature Vector)。
需要注意的是,这个特征向量和矩阵的特征向量(Eigenvector)是两码事。那么矩阵的特 征向量是什么意思呢?矩阵的几何意义是坐标的变换。如果一个矩阵存在特征向量和特征 值,那么这个矩阵的特征向量就表示了它在空间中最主要的运动方向。如果你对这几个概念 还不太理解,也不用担心,在介绍矩阵的时候,我会详细说说什么是矩阵的特征向量。
向量的运算
标量和向量之间可以进行运算,比如标量和向量相加或者相乘时,我们直接把标量和向量中 的每个元素相加或者相乘就行了,这个很好理解。可是,向量和向量之间的加法或乘法应该 如何进行呢?我们需要先定义向量空间。向量空间理论上的定义比较繁琐,不过二维或者三 维的坐标空间可以很好地帮助你来理解。这些空间主要有几个特性:
- 空间由无穷多个的位置点组成;
- 这些点之间存在相对的关系;
- 可以在空间中定义任意两点之间的长度,以及任意两个向量之间的角度;
- 这个空间的点可以进行移动
有了这些特点,我们就可以定义向量之间的加法、乘法(或点乘)、距离和夹角等等。 两个向量之间的加法,首先它们需要维度相同,然后是对应的元素相加。
所以说,向量的加法实际上就是把几何问题转化成了代数问题,然后用代数的方法实现了几 何的运算。我下面画了一张图,来解释二维空间里,两个向量的相加,看完你就能理解了。
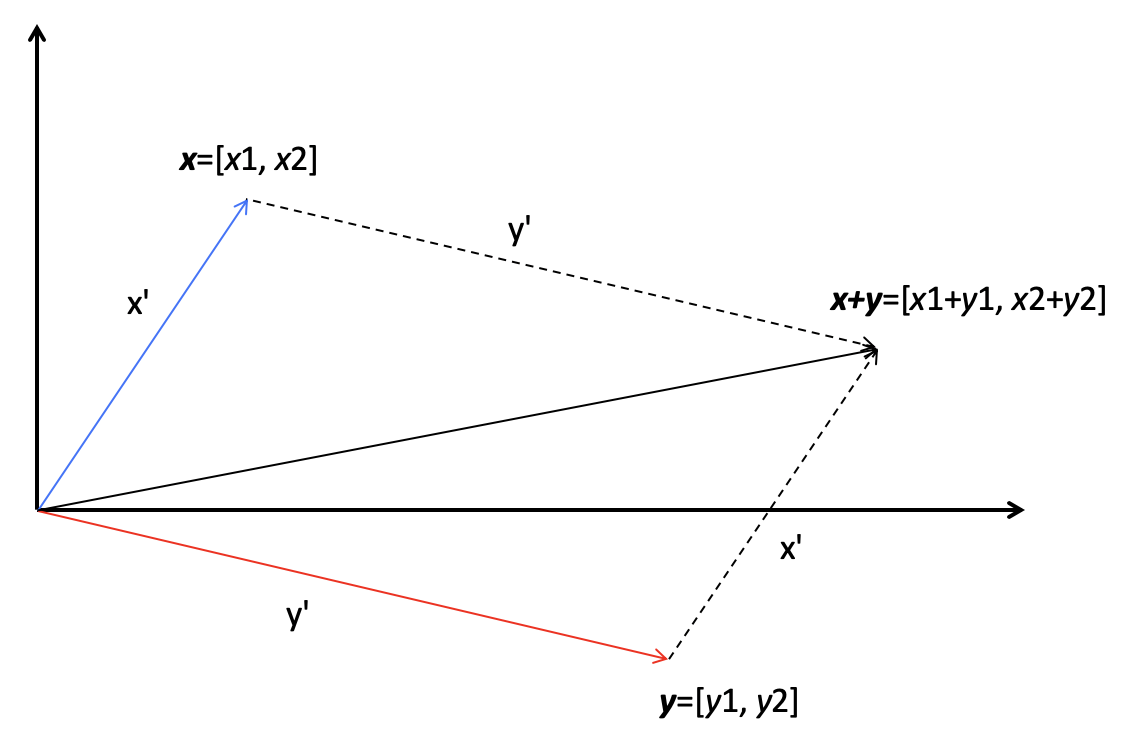
在这张图中,有两个向量 x 和 y,它们的长度分别是 x'和 y',它们的相加结果是 x+y, 这个结果所对应的点相当于 x 向量沿着 y 向量的方向移动 y',或者是 y 向量沿着 x 向量 的方向移动 x'。
向量之间的乘法默认是点乘,向量 x 和 y 的点乘是这么定义的:
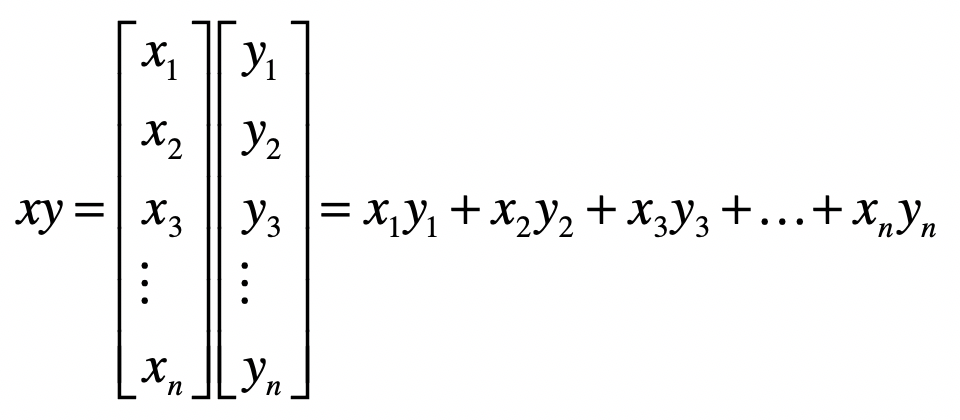
点乘的作用是把相乘的两个向量转换成了标量,它有具体的几何含义。我们会用点乘来计算 向量的长度以及两个向量间的夹角,所以一般情况下我们会默认向量间的乘法是点乘。至于 向量之间的夹角和距离,它们在向量空间模型(Vector Space Model)中发挥了重要的作 用。信息检索和机器学习等领域充分利用了向量空间模型,计算不同对象之间的相似程度。
矩阵的运算
矩阵由多个长度相等的向量组成,其中的每列或者每行就是一个向量。因此,我们把向量延 伸一下就能得到矩阵(Matrix)。
从数据结构的角度看,向量是一维数组,那矩阵就是一个二维数组。如果二维数组里绝大多 数元素都是 0 或者不存在的值,那么我们就称这个矩阵很稀疏(Sparse)。对于稀疏矩 阵,我们可以使用哈希表的链地址法来表示。所以,矩阵中的每个元素有两个索引。
我用加粗的斜体大写字母表示一个矩阵,例如 X ,而 $X_{12}, X_{22},…, X_{nm}$ 等等,表 示矩阵中的每个元素,而这里面的 n 和 m 分别表示矩阵的行维数和列维数。
我们换个角度来看,向量其实也是一种特殊的矩阵。如果一个矩阵是 n × m 维,那么一个 n × 1 的矩阵也可以称作一个 n 维列向量;而一个 1 × m 矩阵也称为一个 m 维行向量。
同样,我们也可以定义标量和矩阵之间的加法和乘法,我们只需要把标量和矩阵中的每个元 素相加或相乘就可以了。剩下的问题就是,矩阵和矩阵之间是如何进行加法和乘法的呢?矩 阵加法比较简单,只要保证参与操作的两个矩阵具有相同的行维度和列维度,我们就可以把 对应的元素两两相加。而乘法略微繁琐一些,如果写成公式就是这种形式:
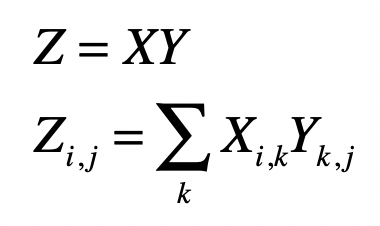
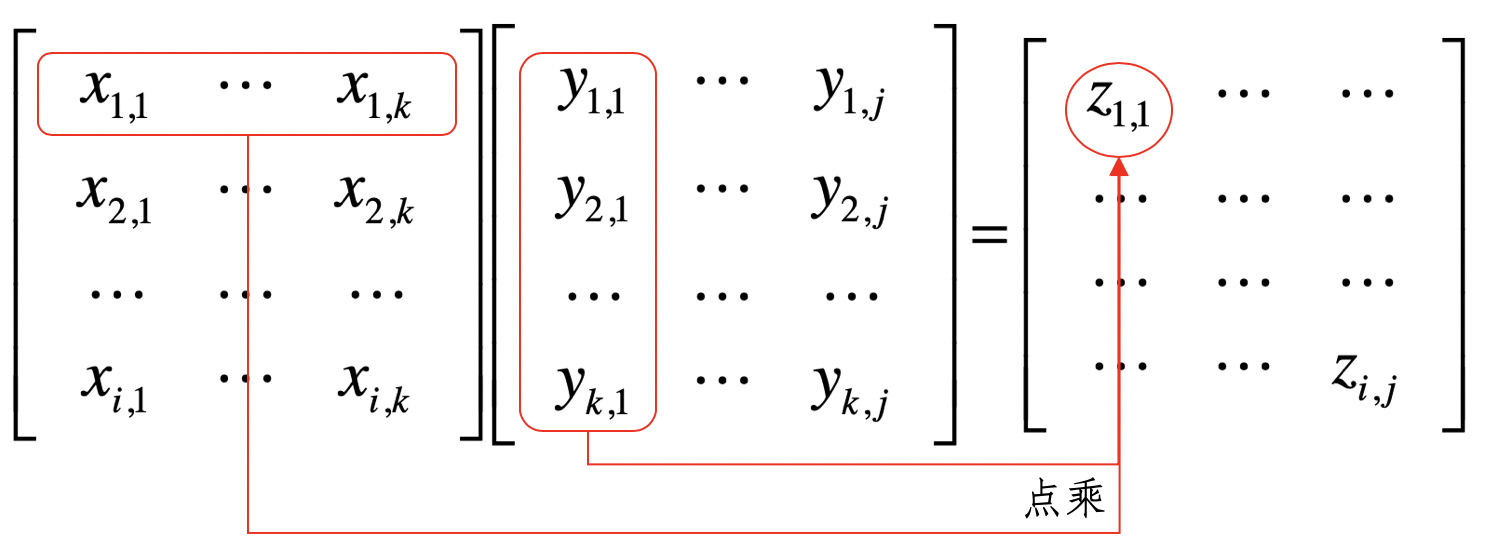
其中,矩阵Z为矩阵X和Y的乘积, X是形状为 i x k 的矩阵,而Y是形状为 k × j 的矩阵。 X的列数 k 必须和 Y的行数 k 相等,两者才可以进行这样的乘法。
我们可以把这个过程看作矩阵 的行向量和矩阵 的列向量两两进行点乘,我这里画了 张图,你理解了这张图就不难记住这个公式了。
两个矩阵中对应元素进行相乘,这种操作也是存在的,我们称它为元素对应乘积,或者 Hadamard 乘积。但是这种乘法咱们用得比较少,所以你只要知道有这个概念就可以了。
除了加法和乘法,矩阵还有一些其他重要的操作,包括转置、求逆矩阵、求特征值和求奇异 值等等。
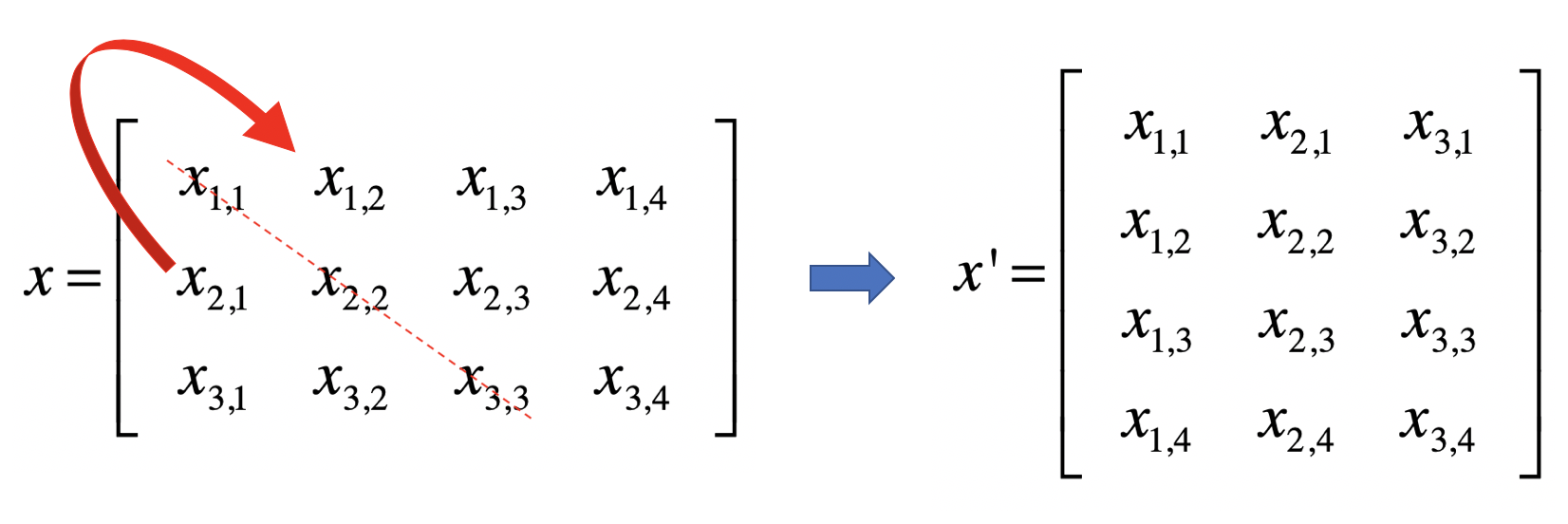
转置(Transposition)是指矩阵内的元素行索引和纵索引互换,例如$X_{ij}$就变为$X_{ji}$ , 相应的,矩阵的形状由转置前的 n × m 变为转置后的 m × n。从几何的角度来说,矩阵的 转置就是原矩阵以对角线为轴进行翻转后的结果。下面这张图展示了矩阵X转置之后的矩阵X':
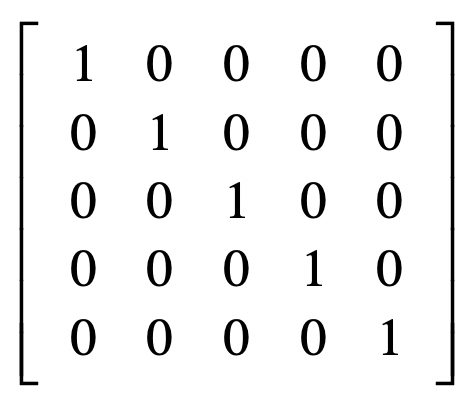
除了转置矩阵,另一个重要的概念是逆矩阵。为了理解逆矩阵或矩阵逆(Matrix Inversion),我们首先要理解单位矩阵(Identity Matrix)。单位矩阵中,所有沿主对角 线的元素都是 1,而其他位置的所有元素都是 0。通常我们只考虑单位矩阵为方阵的情况, 也就是行数和列数相等,我们把它记做$I_n$, 表示维数。我这里给出一个$I_5$ 的示例。
如果有矩阵$X$ ,我们把它的逆矩阵记做$X^{-1}$ ,两者相乘的结果是单位矩阵,写成公式就 是这种形式:
\[X^{-1} X = I_{n}\]特征值和奇异值的概念以及求解比较复杂了,从大体上来理解,它们可以帮助我们找到矩阵 最主要的特点。通过这些操作,我们就可以在机器学习算法中降低特征向量的维度,达到特 征选择和变换的目的。