BP神经网络
BP(back propagation)神经网络是1986年由Rumelhart和McClelland为首的科学家提出的概念,是一种按照误差逆向传播算法训练的多层前馈神经网络,是应用最广泛的神经网络模型之一,本文介绍BP神经网络的原理并介绍实际应用。
背景
1943年,心理学家麦卡洛克等人提出了M-P(McCulloch-Pitts)模型,其本质为模拟人类大脑的神经元和工作原理,掀起了人工神经网络的新篇章。1986年,深度学习之父Geoffrey提出了一种适用于多层感知器的反向传播(Back Propagation,BP)算法。他创新性地增加了神经网络误差的反向传播,该算法可以不断优化神经元间的参数,直到输出的误差在合理范围内。
原理
BP网络是目前在人工智能领域中应用最多的人工神经网络之一。BP神经网络结构架构如图所示。主要由输入层、隐含层和输出层组成。隐藏层的选择会影响网络内部计算过程,进而影响模型的拟合度及预测结果的误差大小。
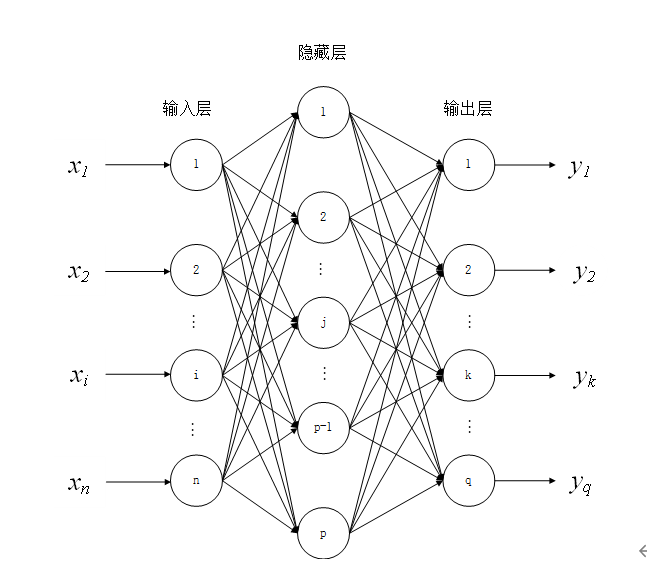
BP神经网络的工作流程为:首先输入层接收信息,并将信息传递给中间的隐藏层;各层通过激励函数对前一层的输出加权处理;最后汇聚到输出层,得到最终计算的结果。将输入结果与目标结果进行对比,根据计算误差的大小来反向调节各个连接的权重。
代码实践
以历史轨迹数据为例,使用BP神经网络进行预测未来航迹走向。模型代码如下:
import torch
import torch.nn as nn
input_dim = 3
class LinearModel(nn.Module):
"""
LinearModel.
"""
def __init__(
self, seq_len=8, h_dim=64, use_cuda=0,embedding_dim=64
):
super(LinearModel, self).__init__()
self.h_dim = h_dim
self.layer1 = torch.nn.Linear(input_dim, h_dim)
self.layer2 = torch.nn.Linear(h_dim, input_dim)
def forward(self, obs_traj):
"""
Inputs:
- obs_traj: Tensor of shape (obs_len, batch, 3)
Output:
- final_h: Tensor of shape (self.num_layers, batch, self.h_dim)
"""
# Encode observed Trajectory
result = []
batch = obs_traj.size(1)
obs_traj_embedding = self.layer1(obs_traj.contiguous().view(-1, input_dim))
obs_traj_embedding = obs_traj_embedding.view(
-1, batch, self.h_dim
)
cur_pos = self.layer2(obs_traj_embedding.view(-1, self.h_dim))
cur_pos = cur_pos.view(-1, batch, input_dim)
return cur_pos
完整代码参见Github链接:https://github.com/ironartisan/trajectory-prediction/tree/master/linear