门控循环单元(GRU)
为了解决标准RNN的梯度消失问题,GRU提出使用两个向量,即更新门(update gate)和重置门(reset gate)的概念,用来决定什么样的信息应该被传递给输出。它可以保存很久之前的信息,也会去掉不相关的信息。
背景
门控循环单元(Gate Recurrent Unit,GRU)是由Cho等人于2014年提出的。与LSTM相比,GRU的结构单元相对更为简单。LSTM虽能缓解循环神经网络因长期依赖带来的梯度问题,但是LSTM有三个不同的门,参数较多,训练起来比较困难。与LSTM相比,GRU只含有两个门控结构,在大多数情况下,两者的表现效果相当。
原理
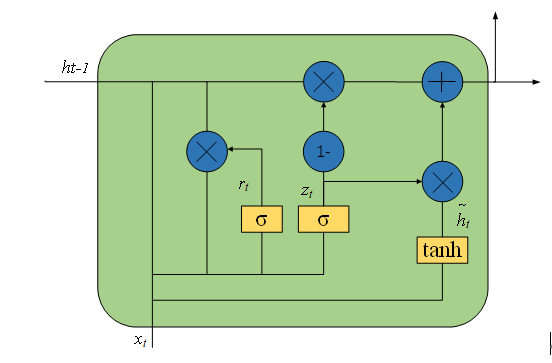
GRU的结构如图所示。
代码
以历史轨迹数据为例,使用GRU网络进行预测未来航迹走向。模型代码如下:
import torch
import torch.nn as nn
import torchsnooper
input_dim = 3
class GRUModel(nn.Module):
"""Encoder is part of both TrajectoryGenerator and
TrajectoryDiscriminator"""
def __init__(
self, seq_len=8, embedding_dim=64, h_dim=64, mlp_dim=1024, num_layers=1,
dropout=0.0, use_cuda=0
):
super(GRUModel, self).__init__()
self.mlp_dim = mlp_dim
self.h_dim = h_dim
self.embedding_dim = embedding_dim
self.num_layers = num_layers
self.use_cuda = use_cuda
self.seq_len = seq_len
self.encoder = nn.GRU(
embedding_dim, h_dim, num_layers, dropout=dropout
)
self.hidden2pos = nn.Linear(h_dim, input_dim)
self.spatial_embedding = nn.Linear(input_dim, embedding_dim)
def init_hidden(self, batch):
state = torch.zeros(self.num_layers, batch, self.h_dim)
if self.use_cuda == 1:
state = state.cuda()
return state
# snoop tensor location
@torchsnooper.snoop()
def forward(self, obs_traj):
"""
Inputs:
- obs_traj: Tensor of shape (obs_len, batch, 3)
Output:
obs_traj shape is torch.Size([8, 64, 3])
obs_traj_embedding shape is torch.Size([512, 64])
# obs_traj_embedding shape is torch.Size([512, 3])
obs_traj_embedding shape is torch.Size([8, 64, 64])
ouput shape is torch.Size([8, 64, 64])
cur_pos shape is torch.Size([512, 3])
cur_pos shape is torch.Size([8, 64, 3])
- final_h: Tensor of shape (self.num_layers, batch, self.h_dim)
"""
# Encode observed Trajectory
result = []
batch = obs_traj.size(1)
# print("obs_traj shape is ",obs_traj.shape)
# print("obs_traj shape is ",obs_traj.contiguous().view(-1, input_dim).shape)
obs_traj_embedding = self.spatial_embedding(obs_traj.contiguous().view(-1, input_dim))
# print("obs_traj_embedding shape is ",obs_traj_embedding.shape)
obs_traj_embedding = obs_traj_embedding.view(
-1, batch, self.embedding_dim
)
# print("obs_traj_embedding shape is ",obs_traj_embedding.shape)
encoder_state_tuple = self.init_hidden(batch)
output, state = self.encoder(obs_traj_embedding, encoder_state_tuple)
cur_pos = self.hidden2pos(output.view(-1, self.h_dim))
# print("cur_pos shape is {}".format(cur_pos.shape))
cur_pos = cur_pos.view(-1, batch, input_dim)
# print("cur_pos shape is {}".format(cur_pos.shape))
return cur_pos
完整代码参见Github链接:https://github.com/ironartisan/trajectory-prediction